
Čo je vo vnútri? Robí to niečo? Vtipná aplikácia, ktorú si môžete zhotoviť sami.
1. Ako to funguje
- Hlavný kovový prepínač je napojený na Arduino nano a jeho stav je monitorovaný. Podľa aktuálneho stavu prepínača sa Arduino rozhoduje. čo sa bude diať so servo motorčekom Ak je prepínač “zapnutý”, Arduino Nano pohne motorčekom a prepínač opäť vypne.
- Druhý z použitých prepínačov slúži ako zapnutie alebo vypnutie prívodu energie pre celé zariadenie (ON/OFF prepínač)
2. Zoznam komponentov a náradia
Die sichersten Online-Casino-Praktiken bei Tipico Casino
Online-Casinos erfreuen sich einer stetig wachsenden Beliebtheit, aber es ist unerlässlich, die Sicherheit und Integrität der Plattformen im Auge zu behalten. Bei Tipico Casino stehen die sichersten Online-Casino-Praktiken im Mittelpunkt, um Spielern ein vertrauenswürdiges und unterhaltsames Spielerlebnis zu bieten. In diesem Artikel werden wir die wichtigsten Aspekte beleuchten, die dazu beitragen, dass Tipico Casino eine der besten Optionen für Glücksspielbegeisterte ist.
Wir werfen einen genauen Blick auf die verschiedenen Sicherheitsmaßnahmen, die Tipico Casino implementiert hat, um die persönlichen Daten und finanziellen Transaktionen der Spieler zu schützen. Darüber hinaus diskutieren wir die Bedeutung von verantwortungsbewusstem Spielen und wie Tipico Casino seinen Spielern dabei hilft, ein gesundes Verhältnis zum Glücksspiel zu bewahren. Tauchen Sie mit uns ein in die Welt der sicheren Online-Casino-Praktiken bei Tipico Casino und erfahren Sie, warum dieser Anbieter eine erstklassige Wahl für alle ist, die Spaß am Glücksspiel haben, ohne Kompromisse bei der Sicherheit einzugehen.
Risikominimierung durch verantwortungsbewusstes Spielen
Wenn es um Online-Casinos geht, ist es entscheidend, sich an die sichersten Praktiken zu halten, um ein faires und unterhaltsames Spielerlebnis zu gewährleisten. Bei Tipico Casino gibt es einige wichtige Richtlinien, die Spieler befolgen sollten, um ihre Sicherheit zu gewährleisten. Eine grundlegende Maßnahme ist die Verwendung eines starken Passworts und die regelmäßige Aktualisierung desselben, um unbefugten Zugriff zu verhindern.
Eine weitere wichtige Praxis ist die Überprüfung der Lizenzierung und Regulierung des Online-Casinos. Tipico Casino ist von der Malta Gaming Authority lizenziert und reguliert, was bedeutet, dass es strenge Standards in Bezug auf Fairness und Sicherheit einhalten muss. Spieler sollten immer darauf achten, dass das Casino, bei dem sie spielen, über die erforderlichen Lizenzen verfügt, um ein sicheres Umfeld zu gewährleisten.
Zusätzlich ist es ratsam, verantwortungsbewusst zu spielen und sich der eigenen Grenzen bewusst zu sein. Tipico Casino bietet verschiedene Tools und Optionen zur Selbstregulierung, wie z.B. Limits für Einzahlungen und Verluste. Spieler sollten diese Funktionen nutzen, um ihr Spielverhalten im Auge zu behalten und ein gesundes Verhältnis zum Glücksspiel zu bewahren.
Tipps zur sicheren Geldtransaktionen im Tipico Casino
Beim Spielen im Tipico Casino ist es wichtig, die sichersten Online-Casino-Praktiken zu beachten, um ein positives Spielerlebnis zu gewährleisten. Eine grundlegende Maßnahme ist die Überprüfung der Lizenz des Casinos, um sicherzustellen, dass es von einer anerkannten Glücksspielbehörde reguliert wird. Tipico Casino verfügt über eine Lizenz der Malta Gaming Authority, was für Seriosität und Sicherheit spricht.
Ein weiterer wichtiger Aspekt ist die Verwendung von sicheren Zahlungsmethoden. Es wird empfohlen, bei Ein- und Auszahlungen etablierte Zahlungsanbieter wie PayPal, Visa oder Mastercard zu nutzen, um die Sicherheit Ihrer Transaktionen zu gewährleisten. Tipico Casino bietet eine Vielzahl von sicheren Zahlungsoptionen für seine Spieler an.
Um Ihre persönlichen Daten zu schützen, ist es ratsam, starke Passwörter zu verwenden und diese regelmäßig zu ändern. Darüber hinaus sollten Sie niemals Ihre Zugangsdaten weitergeben oder auf verdächtige Links klicken. Die Sicherheit Ihrer Daten liegt auch in Ihrer Verantwortung. Meinung.
Zusammenfassend lässt sich sagen, dass die sichersten Online-Casino-Praktiken bei Tipico Casino auf der Wahl eines lizenzierten und vertrauenswürdigen Anbieters, der Nutzung sicherer Zahlungsmethoden und der sorgfältigen Verwaltung Ihrer persönlichen Daten beruhen. Indem Sie diese Praktiken befolgen, können Sie ein sicheres und unterhaltsames Spielerlebnis im Tipico Casino genießen. Meinung.
Schutz vor Betrug und Manipulation
Wenn es um Online-Casinos geht, legt Tipico Casino großen Wert auf Sicherheit und Fairness. Eine der wichtigsten Praktiken für ein sicheres Spielerlebnis ist die Verwendung einer sicheren Internetverbindung. Stellen Sie sicher, dass Sie über eine geschützte Verbindung verfügen, insbesondere wenn Sie persönliche Daten eingeben oder Zahlungen tätigen.
Weiterhin ist es ratsam, verantwortungsbewusst zu spielen und sich an das Budget zu halten. Setzen Sie sich Limits und überschreiten Sie diese nicht. Tipico Casino bietet auch verschiedene Tools zur Selbstkontrolle an, die dabei helfen können, das Spielverhalten im Auge zu behalten. Durch diese Maßnahmen können Spieler sicher und verantwortungsbewusst im Online-Casino von Tipico spielen.
Datenschutz und Privatsphäre im Online-Casino gewährleisten
Wenn es um die sichersten Online-Casino-Praktiken bei Tipico Casino geht, ist es entscheidend, dass Spieler verantwortungsbewusst spielen. Dazu gehört, dass sie ihre Spielzeiten und Einsätze im Auge behalten und sich an ihr individuelles Budget halten. Tipico Casino bietet zudem verschiedene Tools zur Selbstregulierung an, wie beispielsweise Einzahlungslimits, Sitzungsdauerbegrenzungen und die Möglichkeit zur Selbstausschluss.
Weiterhin ist es ratsam, sich über die geltenden Sicherheitsmaßnahmen des Online-Casinos zu informieren. Tipico Casino verfügt über eine sichere SSL-Verschlüsselung, um die Übertragung sensibler Daten zu schützen. Spieler sollten außerdem darauf achten, dass sie nur auf vertrauenswürdigen Geräten spielen und ihre Zugangsdaten niemals teilen. Durch diese Maßnahmen können Spieler ein sicheres und unterhaltsames Spielerlebnis bei Tipico Casino genießen.
Verantwortungsvolles Spielen fördern: Tipps und Empfehlungen
Wenn es um Online-Casinos geht, ist es wichtig, sich an sichere Praktiken zu halten. Bei Tipico Casino gibt es einige wichtige Maßnahmen, die Spieler beachten sollten, um ihre Sicherheit zu gewährleisten. Eine der wichtigsten Praktiken besteht darin, nur auf vertrauenswürdigen Websites zu spielen. Tipico Casino ist ein etablierter Name in der Branche und bietet eine sichere Plattform für Glücksspiele.
Ein weiterer wichtiger Aspekt sicherer Online-Casino-Praktiken bei Tipico Casino ist die Verwendung von sicheren Zahlungsmethoden. Spieler sollten darauf achten, dass sie nur vertrauenswürdige Zahlungsoptionen verwenden, um ihre finanziellen Daten zu schützen. Tipico Casino bietet eine Vielzahl von sicheren Zahlungsmethoden an, darunter Kreditkarten, E-Wallets und Banküberweisungen.
Zusätzlich sollten Spieler verantwortungsbewusst spielen und ihre Limits im Auge behalten. Tipico Casino bietet Tools zur Selbstregulierung an, mit denen Spieler ihre Spielzeit und Ausgaben kontrollieren können. Es ist wichtig, verantwortungsbewusst zu spielen und sich bewusst zu machen, wann es Zeit ist, eine Pause einzulegen.
Letztendlich ist es wichtig, aufmerksam zu sein und verdächtige Aktivitäten zu melden. Bei Tipico Casino steht der Kundensupport rund um die Uhr zur Verfügung, um bei Fragen oder Problemen zu helfen. Spieler sollten jederzeit den Support kontaktieren, wenn sie auf Unregelmäßigkeiten stoßen, um ihre Sicherheit zu gewährleisten.
Im Hinblick auf die Sicherheit beim Online-Glücksspiel ist es unerlässlich, dass Spieler sich bewusst sind und die besten Praktiken anwenden. Bei Tipico Casino stehen die Sicherheit und der Schutz der Spieler an erster Stelle. Durch die Verwendung von sicheren Zahlungsmethoden, strengen Datenschutzrichtlinien und einer zuverlässigen Lizenzierung können Spieler mit Zuversicht spielen. Es ist wichtig, verantwortungsbewusst zu handeln und sich an bewährte Sicherheitsmaßnahmen zu halten, um ein positives Spielerlebnis zu gewährleisten. Mit diesen praktischen Tipps können Spieler ihre Online-Casino-Erfahrung bei Tipico Casino sicher und unterhaltsam gestalten.
Softvér: Arduino IDE
Súbor pre 3D tlač na stiahnutie.
Komponenty
- Arduino nano
- Servo SG90
- LM7805 stabilizátor napätia 5V
- Prepínač
- Jednoduchý prepínač
- 9V baterka
- Adaptér na 9V baterku
- Prepojovacie vodiče
Dobre farebne rozoznateľné. Napríklad červený (napájanie), čierny(zem)
- Pružinka
Náradie
- Spájkovačka
- Cín
- Skrutkovač
- Lepidlo
- Brúska na vytvorenie miesta pre servo motorček a dier pre šróbiky
- Šróbiky a ich priemer do 1,5mm (V projekte bol použitý priemer 1mm)
- Nôž alebo odizolovacie kliešte
3. Schéma zapojenia
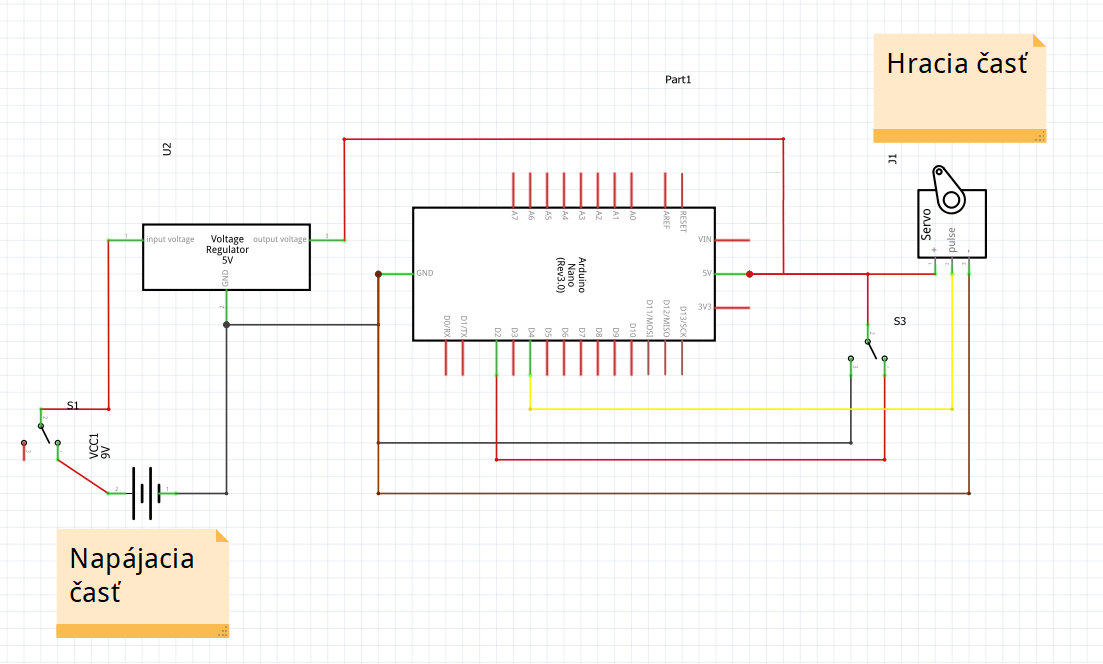
Napájacia časť sa skladá z
- 9V baterky
- Jednoduchého prepínača (2 vývody)
- Stabilizátora napätia na 5V
Hracia časť sa skladá z
- Dvojpolohového prepínača (3 vývody – 5V/ pin(D2) / GND)
- Servo SG90
4. 3D tlačené diely, úprava mechanických komponentov a montáž celej zostavy
Pred použitím stabilizátora musíme odstrániť jeho chladič ináč by sa súčiastka s ďalšími inými do nášho boxu nezmestila. Box bol navrhnutý tak, aby bol čo najkompaktnejší a zároveň chladič pri našom odbere ani nebude potrebný.


Vytlačené časti upravíme vhodne pre naše šróbiky, dbáme na veľkosti dierok s veľkou opatrnosťou. Zároveň si môžeme prispájkovať potrebné vypínače podľa schémy.
Začneme napájacou časťou. Adaptér na baterku si vhodne upravíme tak aby sme mohli červený káblik (9V) spájkovať s jednoduchým vypínačom (2 vývody). Prečo pripájame na tento vypínač 9V a nie stabilizovaných 5V pomocou nášho stabilizátora? Dôvod je jednoduchý, kebyže ovládame 5V tak by sa nám v stabilizátore určitá energia strácala, čo by ovplyvnilo výdrž baterky. Tú chceme uchovať práve na funkčnosť boxu.
Na fotke vidíme zostavený prorukt. Druhý červený káblik bude pripojený na spomínaný stabilizátor kedy bude energia tiecť len vtedy keď bude tento ‘‘hlavný“ prepínač zapnutý.


Následne sa môžeme pomocou digitálneho multimetra presvedčiť o funkčnosti prepínača ako aj stabilizátora.

Ako ďalší si pripravíme hrací spínač, ktorý prispájkujeme so zapojením podľa schémy v neskoršom štádiu keď budú prichystané ostatné komponenty. Podľa fotky smerom zhora GND (čierny), D2 (tenký červený), 5V (hrubý červený)

Na nasledujúcej fotke môžeme vidieť vytlačené časti okrem samotného boxu. Všimnime si pohyblivú časť na ktorej je priskrutkovaný držiak, ktorý bude spojený s boxom. Toto priskrutkovanie bolo zamenené pripevnením pomocou lepidla, kvôli tomu aby táto časť lepšie priľahla keď bude zavretá. S tým súvisí vytvorenie spôsobu spojenia tejto pohyblivej časti k boxu. Jedným z riešení je vytvorenie asi jedno-centimetrových paličiek ktoré budú vsunuté do boxu tak, aby sa naša pohyblivá časť stala skutočne pohyblivou.


 Ako prvý budeme vkladať servo motorček. Odstránime spodnú krytku serva a zalepíme vrchnú časť serva, ktorá má tendenciu sa vysúvať. Hlavne kvôli tomu, že sme odstránili šrobíky, ktoré nedržia len spodnú krytku, ale aj časť kde sú ozubené kolieska. Najlepšie bolo v tomto prípade použiť sekundové lepidlo a časť, ktorá sa vysúva, zalepiť.
Ako prvý budeme vkladať servo motorček. Odstránime spodnú krytku serva a zalepíme vrchnú časť serva, ktorá má tendenciu sa vysúvať. Hlavne kvôli tomu, že sme odstránili šrobíky, ktoré nedržia len spodnú krytku, ale aj časť kde sú ozubené kolieska. Najlepšie bolo v tomto prípade použiť sekundové lepidlo a časť, ktorá sa vysúva, zalepiť.

Medzi ďalšie úpravy serva patrí pripevnenie ruky, ktorá bude spínať dvojpolohový prepínač. V balení servo SG90 nájdeme potrebný materiál pre uchytenie tohto ramena vrátene šrobíkov. Ako prvé si vyberieme ručičku ako na fotke. Obstrihnutú časť vložíme dnu a následne pripevníme spomínanou skrutkou.

![]()


Vytlačený box a jeho úchytka je pre servo úzke. Pri riešení tohto problému je možné postúpiť dvoma smermi. Buď úchytky premodelujeme v programe alebo úchytky upravíme tak aby sa tam servo vošlo.
V tomto projekte bola zvolený variant číslo dva avšak odporúčam variantu číslo jeden kvôli jednoduchosti. Miesto pre servo teda úchytky majú vymodelované dierky pre skrutky . Ako môžete vidieť na predchádzajúcej fotke , šrobíky sú pripevnené najprv na servo a následne do vymodelovanej časti. Spôsob pripevnenia bol v tomto projekte riešený nie skrutkovaním šrobikov do vnútra ale ich prilepením k týmto dierkam, z dôvodu ťažkej dostupnosti pre ich skrutkovanie. Po prilepení šróbikov nasledovalo prilepenie serva k vymodelovaným častiam a to zvrchu viditeľnej ľavej a pravej časti z dôvodu lepšieho držania serva na mieste.

Pôvodnú dĺžku káblov serva upravíme podľa potrieb (cca 8-10cm). Pripevnené servo môžeme teraz prispájkovať k našej doske podľa schémy (hnedý=GND, červený=5V, žltý=D4). V tomto bode môžeme vyskúšať funkčnosť motorčeka a nastaviť pohyb ruky (v programe sú hodnoty prednastavené a mali by sedieť, ale je vhodné to vyskúšať najlepšie vložením všetkých súčiastok pre presnejšie nastavenie ramena serva).
Pripevníme prepínač napájania:

Vývody stabilizátora sú na doske označené ako VCC (5V) a GND. Tieto vývody môžeme prispájkovať na dosku Arduino na piny 5V a GND. Zároveň môžeme na dosku prispájkovať aj pripravený hrací spínač a to na piny GND, D2 a 5V podľa predošlých inštrukcii. Po pripojení všetkých potrebných komponentov na dosku a skúške programu, hlavne spomínaného serva a hracieho spínača, ju môžeme pripevniť na určené miesto. Doska sa tak isto môže zaskrutkovať (náročnejší postup) alebo prilepiť. V projekte bola doska prilepená.

V zadaní komponentov bola spomenutá aj pružina, môžeme použiť napríklad aj pružinku z pera. Keďže servo vyhadzuje pohyblivú časť tak vysoko, že nedoľahne naspäť je potrebné túto pohyblivú časť nejakým mechanizmom pridržiavať. Na toto nám skvele poslúži práve spomínaná pružina, preto je v 3D modele vynechaná dierka. Pružinu na toto miesto dôkladne prilepíme.

Na druhú stranu spružiny si musíme nájsť miesto kde bude pripevnená. V projekte na toto pripevnenie skvelo poslúžila doska a jej piny. Spružinu sme prispájkovali na nevyužitý pin. Počas vytvárania úchytu sa uistite aby pohyblivá časť nebola prehnane prichytená ale taktiež aby nebola úplne uvoľnená.

Medzi posledné kroky patrí pripevnenie hracieho prepínača pomocou závitov nachádzajúcich sa v balení. Celú túto časť následne pripevníme k boxu a pripraveným dierkam pomocou skrutiek


Do priestoru, ktorý vidíme na predchádzajúcej fotke vložíme stabilizátor napätia a na spodnú krytku osadíme držiaky batérie a samotnú batériu. Pred nasadením poslednej spodnej krytky nastavíme súčiastky tak aby sa nám všetko zmestilo a zaskrutkujeme .


Na začiatku bola ukázaná aj táto časť boxu.
Kedže ale bráni v zatvorení boxu je vhodné ju ešte orezať podľa potreby pružiny. Poslednou úpravou je orezanie nadbytočných častí na hlavnom boxe aby box vyzeral ako na začiatočnej fotke.
5. Inštalácia potrebného softvéru
- Inštalácia softvéru Arduino IDE
Softvér Arduino si môžete bezplatne inštalovať na stránke https://www.arduino.cc/en/software
- Inštalácia manažéra dosiek
Aby sme mohli používať našu dosku (Aduino nano) musíme si nainštalovať doplnok Arduino AVR boards podľa ukážky

![]()

Ako ďalší krok si vyberieme našu dosku Arduino nano


Pripojenie dosky a výber portu
Dosku si pripojíme do USB portu a v programe si tento port vyberieme v ponuke Port


Inštalácia knižnice servo.h
Ako na to? Ako prvé si otvoríme aplikáciu Arduino. Na hornej lište môžeme vidieť ponuku nastavení programu.

Zakliknutím na položku Tools(nastavenia) sa nám ukáže jej ponuka v ktorej nás bude zaujímať ďalšia položka Manage Libraries(spravovať knižnice).

Posledným krokom bude vyhľadanie a inštalácia vhodnej knižnice pre servo podľa ukážky. Vo výbere si zvolíme najnovšiu verziu a klikneme Install (inštalovať). Po inštalácií servo knižnice alebo inej knižnice je vhodné celý program reštartovať.

6. Vysvetlenie a nahranie programu
#include <Servo.h> //Pridanie/zahrnutie knižnice Servo.h
Servo servo;//Vytvorenie Servo objektu servo (Servo <vlastný názov pre servo>)
int servo_pin=4;//Deklarovanie pinu pre servo (v našom prípade hodnota 4)
int spinac=2; //Deklarovanie pinu pre hrací spínač (v našom prípade hodnota 2)
int stav_spinac; //Deklarovanie premennej do ktorej bude ukladaný stav spínača
int servo_start=9;//Začiatočná hodnota v stupňoch polohy serva (skryté)
int servo_end=135;//Konečná hodnota polohy serva (spínanie spínača)
void setup() {
Serial.begin(9600);//Začiatok seriálovej komunikácie(dátového toku) so zámerom získania dát od arduina v serialovom okne (objekt Serial s metódou begin a hodnotou rýchlosti komunikácie v bitoch za sekundu)
servo.attach(servo_pin);//Metóda attach(pripojiť) má za následok pripojenie deklarovanej premennej servo_pin s hodnotou 4
pinMode(spinac,INPUT_PULLUP);//definovanie pin módu ,teda či sa jedná o OUTPUT(vývod) alebo INPUT(prívod) . V našom prípade sme definovali INPUT_PULLUP čo znamená ,že nemusíme pripojiť rezistor k spínaču (prívod signálu) ale aktivujeme vnútorný rezistor Atmega čipu
}
void loop() {
//program sa v tejto časti opakuje dookola zatiaľ čo void_setup() je vyvolaný iba pri zapnutí programu
stav_spinac=digitalRead(spinac);//digitálne čítanie hodnoty premmenej spinac(pin na ktorom je spínač) a ukladanie do premennej stav_spinac pre zachovanie stavu spínača
//Serial.println(stav_spinac); //Táto časť slúži na overenie hodnoty na pine spinac a jej vypísanie na seriálovú obrazovku.
if(stav_spinac==0){ //Jedná sa o podmienku , ktorá bude splnená keď bude nameraná hodnota 0( v našom prípade to bude značiť ,že servo sa vysunie z krabičky na konečnú klikaciu poziciu)
servo.write(servo_koniec); //metóda write(napíš) zabezpečí presunutie serva na danú pozíciu (konečnú pozíciu)
}
if(stav_spinac==1){ //Jedná sa o podmienku , ktorá bude splnená keď bude nameraná hodnota 1( v našom prípade to bude značiť ,že servo sa zasunie do krabičky na začiatočnú hodnotu)
servo.write(servo_start); //metóda write(napíš) zabezpečí presunutie serva na danú pozíciu (začiatočnú pozíciu)
}
}
7. Analyzovanie kódu
Serialová komunikácia
Dôležité je pripomenúť spúšťanie seriálovej komunikácie v aplikácií Arduino z dôvodu zistenia hodnoty pri vypnutí alebo zapnutí hracieho spínača a teda prispôsobenie pre náš program a našu podmienku v kóde (Jeden smer vyvolá 1 a druhý 0). Našou úlohou bude zistenie stavu nášho spínača. Tento krok budeme robiť v momente kedy bude náš spínač pripojený k doske.

Dôležité je nastaviť komunikačnú rýchlosť. To docielime v pravom dolnom rohu v okne seriálového okna. Hodnotu nastavíme na 9600 baud.

Samozrejme, predtým ako budeme chcieť komunikovať s Arduinom treba doň nahrať kód. Počas nahrávania Serial monitor vypneme a zapíname ho až po nahratí kódu. Kód nahráme pomocou tlačidla Upload
![]()
Super článok, dobre vysvetlené a účinné, ďakujem.
Dobrý deň. Keď so uvidel tento blog, rozhodol som sa, že si túto “krabičku” urobím. O tlačené diely nebol problém. Keďže pri práci s arduinom
začínam, spoľahnul som sa uvedený článok a odpálil som arduino nano. Kde nastal problém som zistil neskôr. Natrafil som na dve chyby. Prvá chyba je v programe a to: riadok 7- servo start, toto je OK, ale riadok 19 je – servo koniec, musí tam byť tiež servo end. Ale dosť závažná chyba je v schéme zapojenia. Hrací spínač je zapojený nesprávne. Pri tomto zapojení dôjde ku skratu napajácieho napätia. Správne má byť zapojený
tak, že stredný pin spínača je zapojený na vstup D2 arduina a na krajné piny je zapojené plus a gnd. Po tejto oprave a oprave programu “krabička” funguje na prvý krát.